随着技术的飞速发展,人工智能(AI)已成为自动驾驶开发的核心驱动力。它不仅重塑了车辆感知世界的方式,更在应用软件开发层面,催生了一场深刻的变革。本文将探讨人工智能在自动驾驶软件开发中的关键应用领域。
一、 环境感知:车辆的“眼睛”与“大脑”
自动驾驶的首要任务是理解周围环境。传统计算机视觉方法在复杂、动态的场景中捉襟见肘,而基于深度学习的人工智能模型在此大放异彩。
- 目标检测与识别:卷积神经网络(CNN)等模型能够实时、高精度地识别车辆、行人、交通标志、车道线等关键目标,其性能远超基于规则的传统算法。
- 语义分割:为图像中的每一个像素分配类别标签,精确理解道路结构、可行驶区域及障碍物边界,为路径规划提供精细化的地图信息。
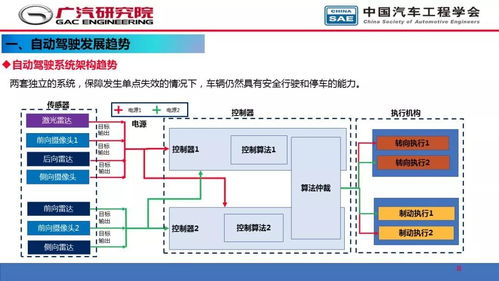
- 多传感器融合:AI算法(如卡尔曼滤波的神经网络变体)能够高效融合摄像头、激光雷达(LiDAR)、毫米波雷达和超声波传感器的数据,构建统一、鲁棒的环境模型,弥补单一传感器的局限性。
二、 决策与规划:车辆的“智慧中枢”
在精准感知的基础上,车辆需要像人类司机一样做出智能决策。这主要依赖于强化学习和预测模型。
- 行为预测:通过循环神经网络(RNN)或图神经网络(GNN),AI可以预测其他交通参与者(车辆、行人)的未来轨迹和意图,这是实现安全、拟人化驾驶的关键。
- 路径与运动规划:结合高精地图和实时感知数据,AI规划算法(如基于搜索、采样或优化的方法)能计算出安全、舒适、高效的最优行驶轨迹,并实时应对突发状况。
- 决策制定:在复杂的交互场景(如无保护左转、并入高速车流)中,基于深度强化学习的模型可以通过与仿真环境的巨量交互,学习到接近最优的驾驶策略。
三、 控制执行:精准的“手脚”配合
规划好的轨迹需要被精准执行。AI,特别是模型预测控制(MPC)与神经网络结合的方法,能够实现对油门、刹车和转向的平滑、自适应控制,确保车辆严格跟随规划路径,同时兼顾乘坐舒适性和能耗。
四、 仿真与测试:AI驱动的开发加速器
自动驾驶系统的训练与验证严重依赖海量数据。AI在此环节的应用至关重要:
- 仿真环境生成:利用生成对抗网络(GAN)等技术,可以创造出大量逼真、多样化的极端 Corner Case 场景,用于训练和测试算法的鲁棒性,大幅降低实车测试的成本与风险。
- 数据闭环与迭代:AI软件能够自动分析实车路测数据,识别系统短板,并自动生成针对性的仿真测试用例或重新标注训练数据,驱动算法模型持续迭代优化,形成高效的开发闭环。
五、 人工智能应用软件开发的关键趋势
在软件开发层面,呈现以下趋势:
- 端到端学习:探索从原始传感器数据直接输出控制指令的端到端神经网络模型,简化传统流水线式的复杂系统架构。
- 软件2.0与数据驱动:开发范式从“编写明确逻辑”的软件1.0,转向“定义网络结构并提供数据”的软件2.0模式,数据(特别是高质量标注数据)成为核心资产。
- 边缘计算与模型优化:为了满足车载嵌入式平台的实时性、功耗和算力约束,模型压缩(如剪枝、量化)、知识蒸馏和专用AI芯片(如NPU)的软件开发与适配成为关键技术。
- 安全与可解释性:随着AI模型复杂度增加,确保其决策安全、可靠且可解释(XAI)的软件开发框架和测试标准日益受到重视。
****
人工智能已深度渗透到自动驾驶软件开发的每一个环节,从感知、决策到控制,乃至整个开发测试流程。它不仅是实现全自动驾驶梦想的技术基石,更正在引领汽车工业向智能化、软件定义的方向深刻转型。未来的竞争,将很大程度上是人工智能算法创新与高效软件开发能力的竞争。